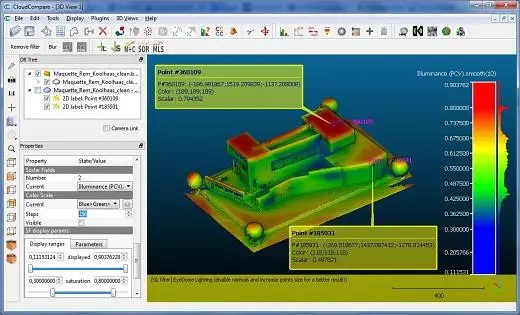
CloudCompare是3D点云(和三角形网格)处理软件。它最初设计为仅在3D点云之间执行比较。它依赖于特定的八叉树结构,相对于此特定功能,该结构可实现出色的性能(1)。由于点云是由高数据速率3D激光扫描仪采集的,因此CloudCompare还可以处理标准笔记本电脑上的巨大点云(通常超过1000万个点)。迅速地,已经包括了点云和三角形网格之间的比较(见下文)。之后,集成了许多用于点云处理的算法(注册,重采样,颜色/正常/标量字段管理,统计计算,传感器管理,交互式或自动分段等)以及显示增强工具(可自定义的色带,颜色和法线向量处理,校准图片处理,OpenGL高级着色器和其他插件)。...
分类目录
具有商业许可的所有平台的CloudCompare替代品
1
0